A tutorial.
Applying advanced robotics principles to quadrotor flight.
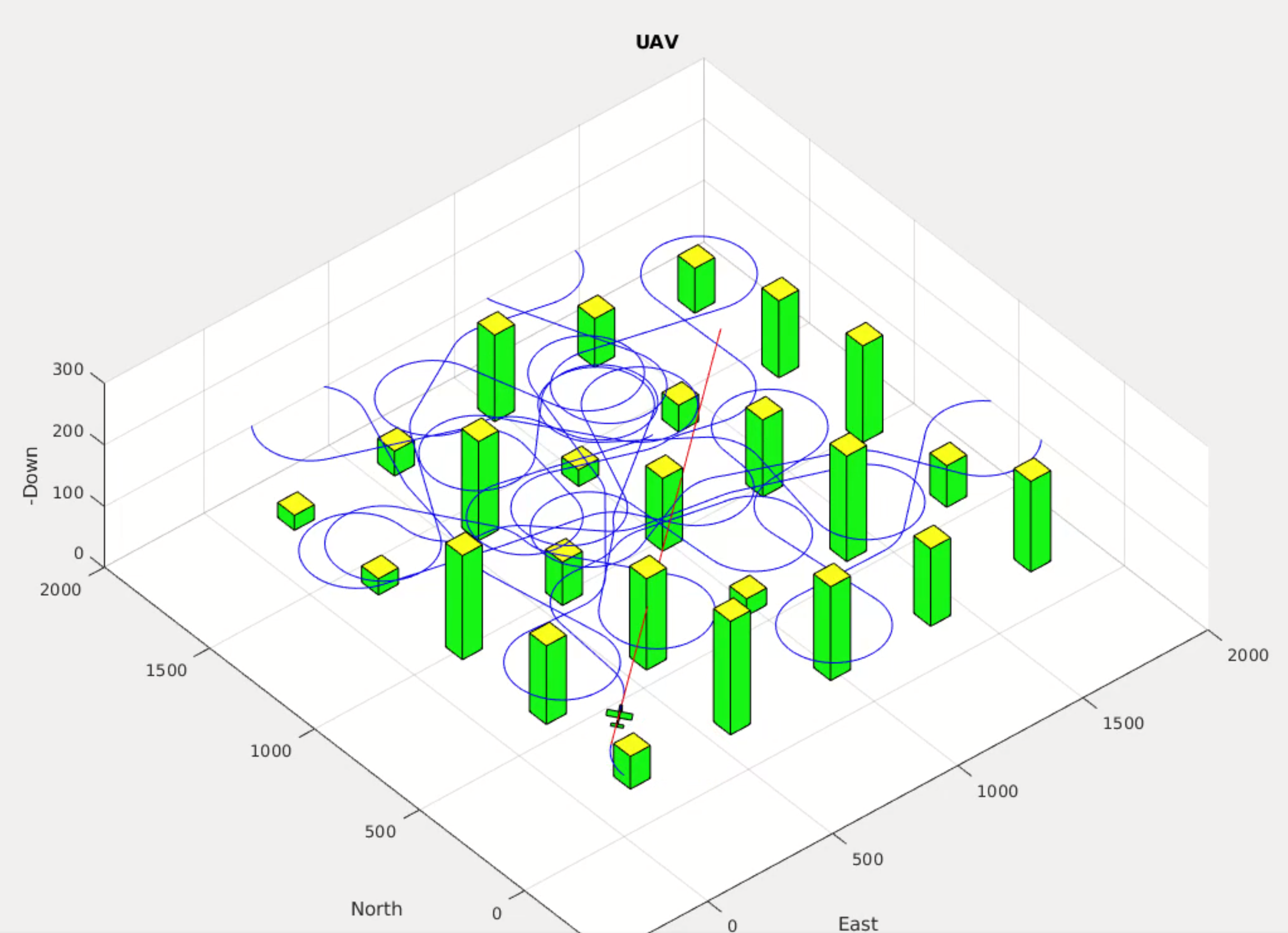
A ground-up implementation of simulation and autonomy algorithms in Matlab and Simulink, from dynamic modeling to path planning.
Class project for the graduate-level Optimal Control and Estimation course at MIT.
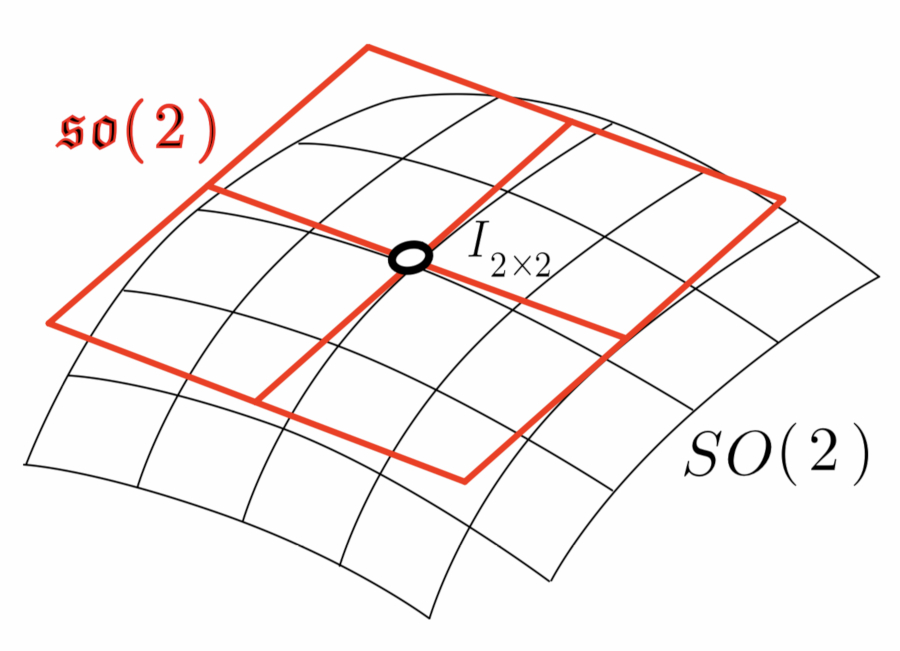
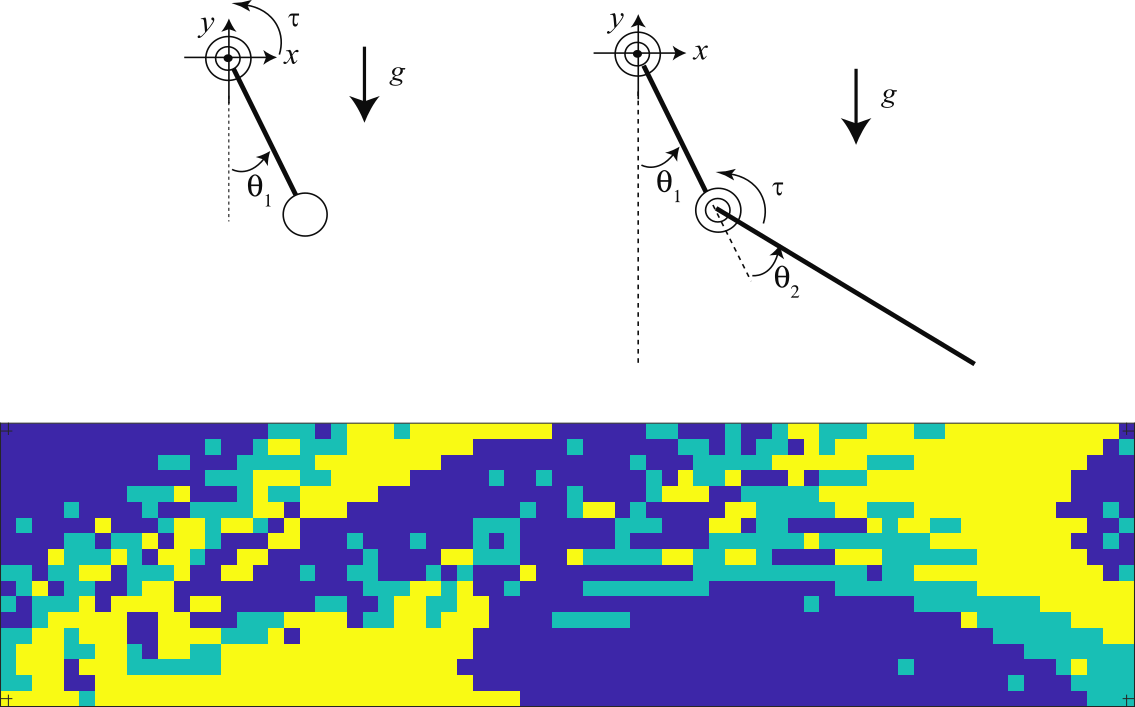
Class project for the graduate-level underactuated robotics course at MIT.
An investigation into different forms of attitude control.
Undergraduate Capstone Project
A personal attempt to apply linear control theory to a real-world system.
Undergraduate research project.
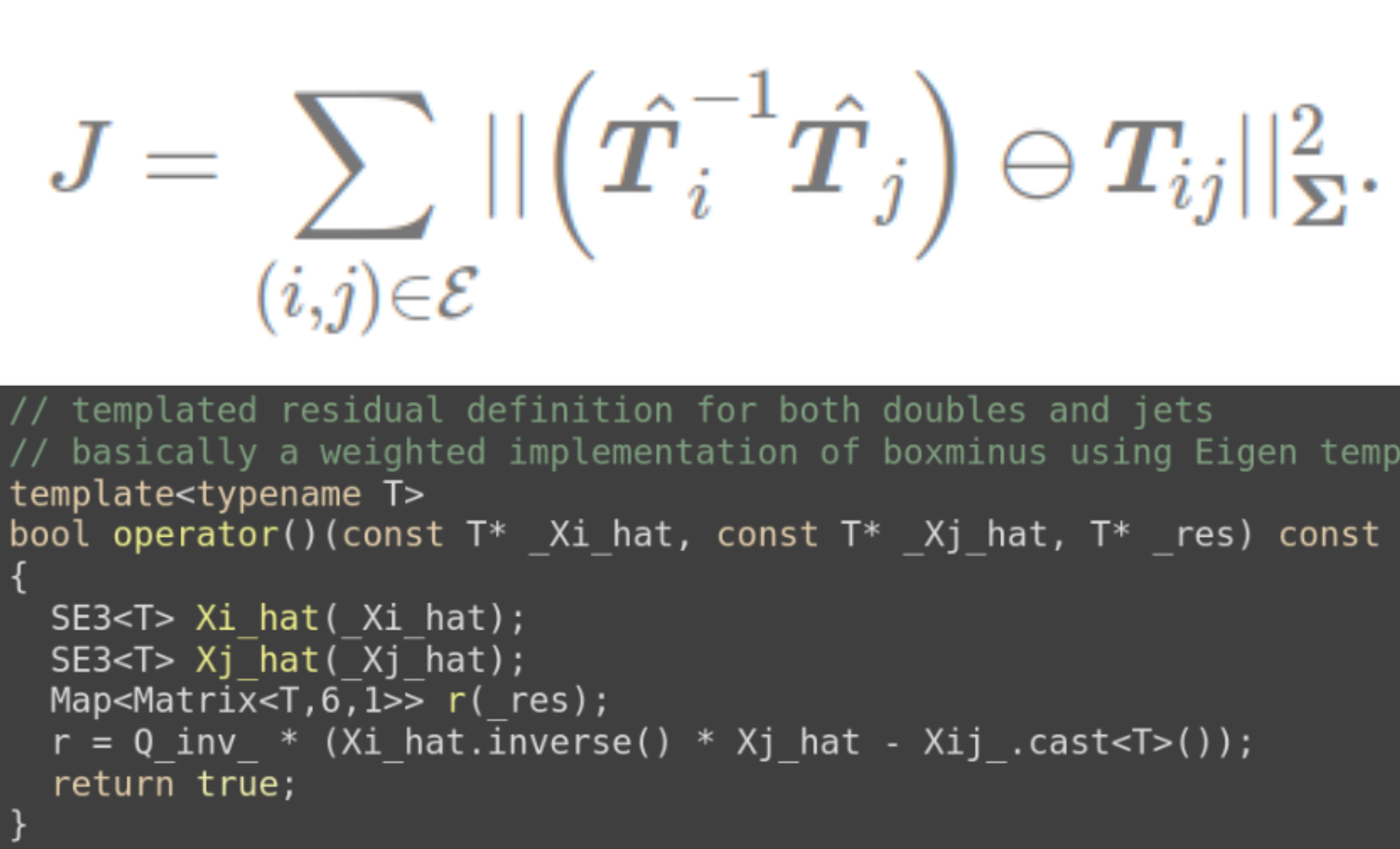
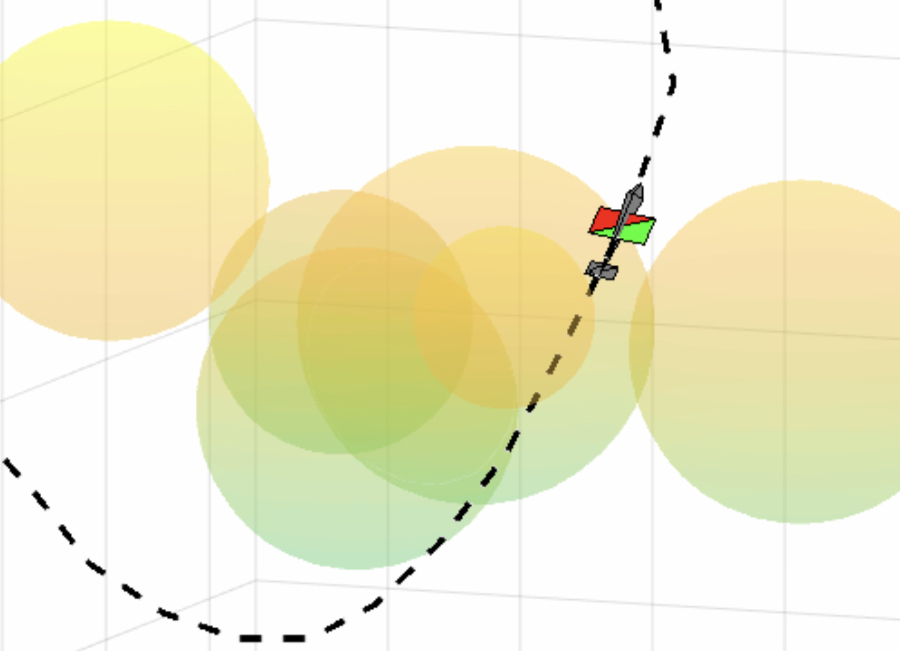
Tutorial and experiments in PGO with Ceres.
Current pending research for the Department of Energy.
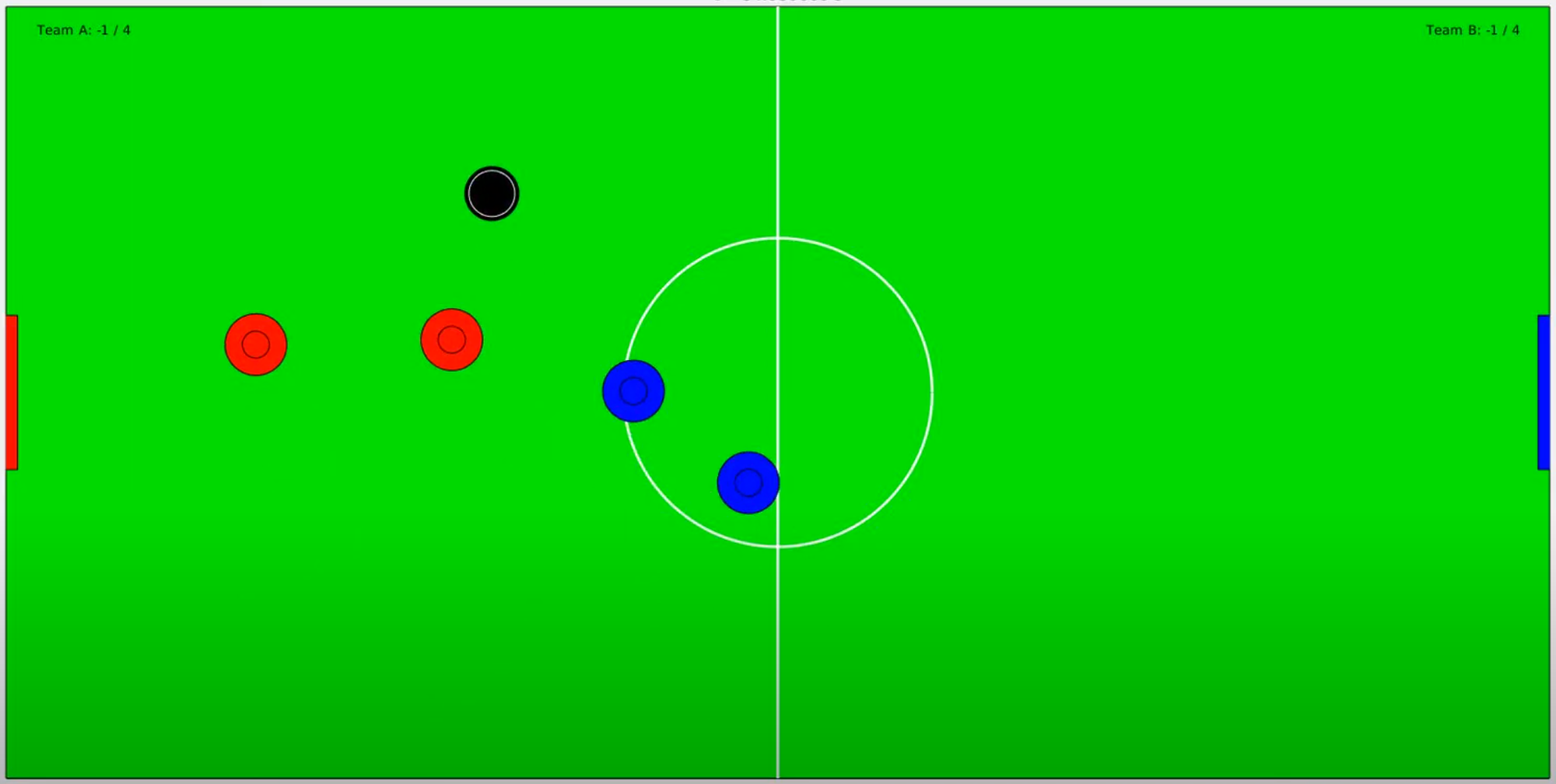
An application of biologically-inspired optimization algorithms.
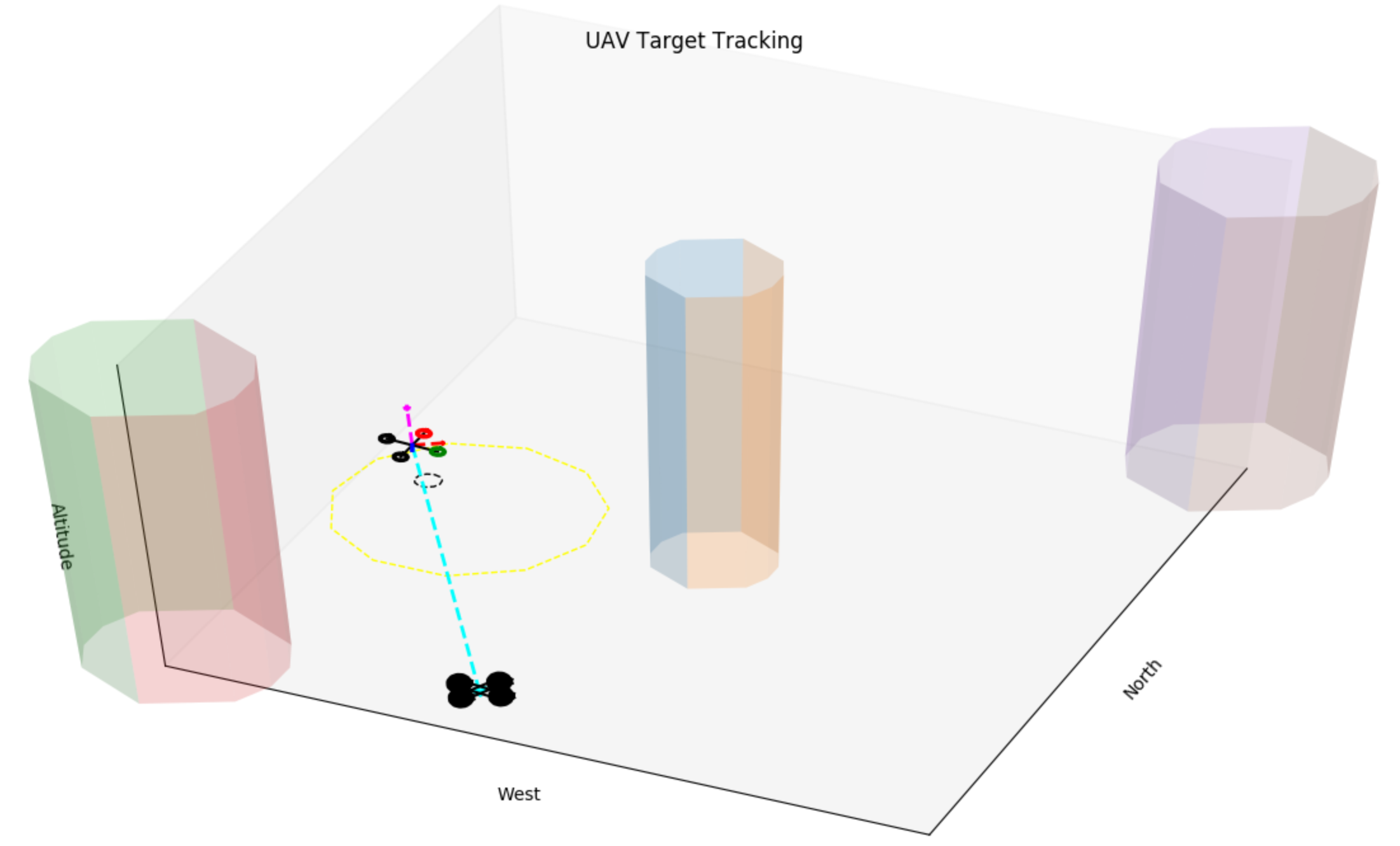
Application for a multi-rotor simulation sandbox.
Class project for a Machine Learning course at MIT.
An investigation into non-parametric belief state representations.
Current pending research for the Office of Naval Research.
An in-browser simple app for visualizing GPS trajectories superimposed on a 3D map.
Visualize a spreadsheet budget with Sankey Diagrams in the browser.
Light-weight browser interface for creating triangulation art.
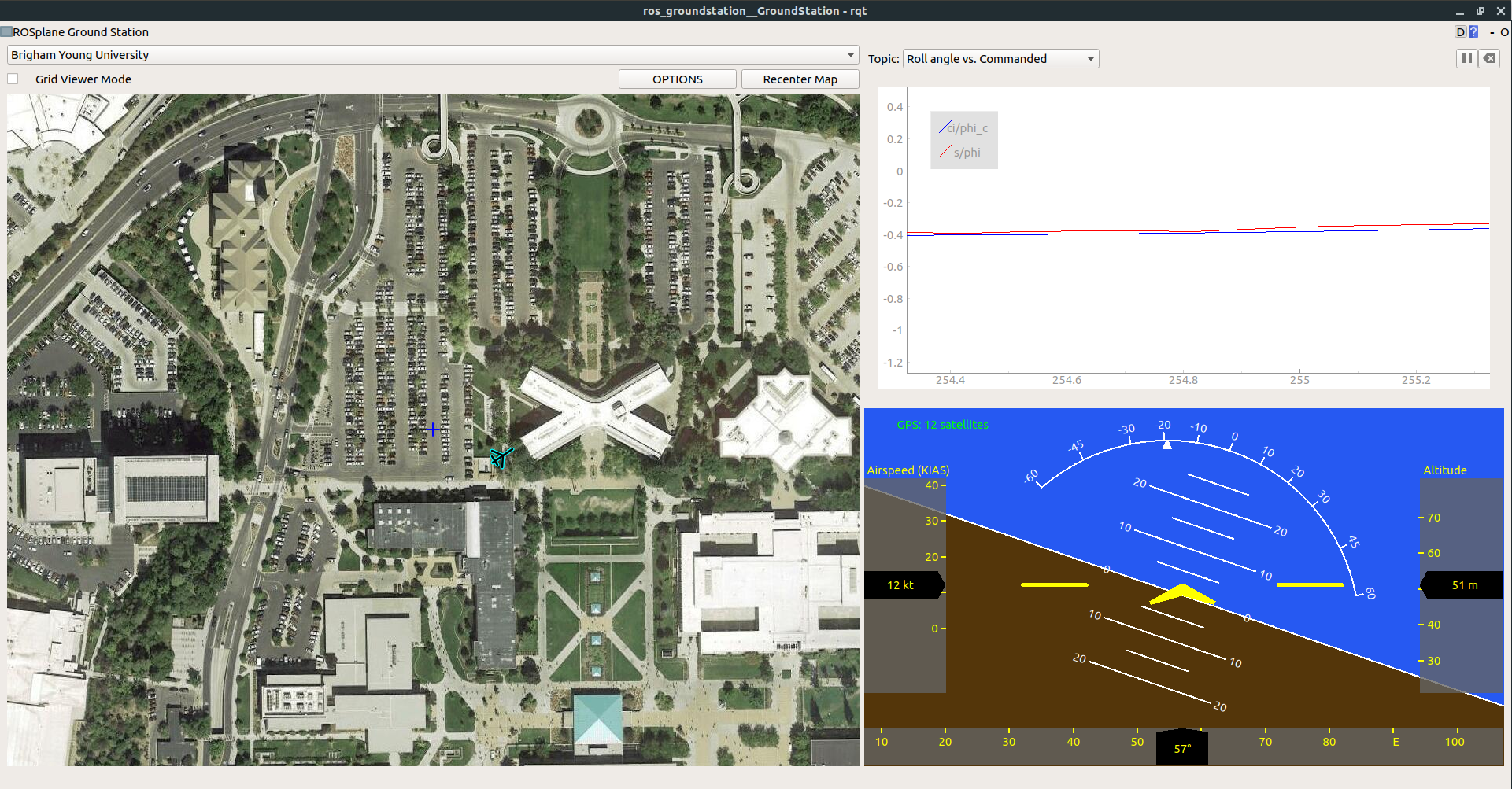
A ROS-based GUI for communicating with a fixed-wing UAV.