Apollo Spacecraft Control
Project description in progress…
Motivation
Spacecraft Model
Controlling the Spacecraft
Controller Types
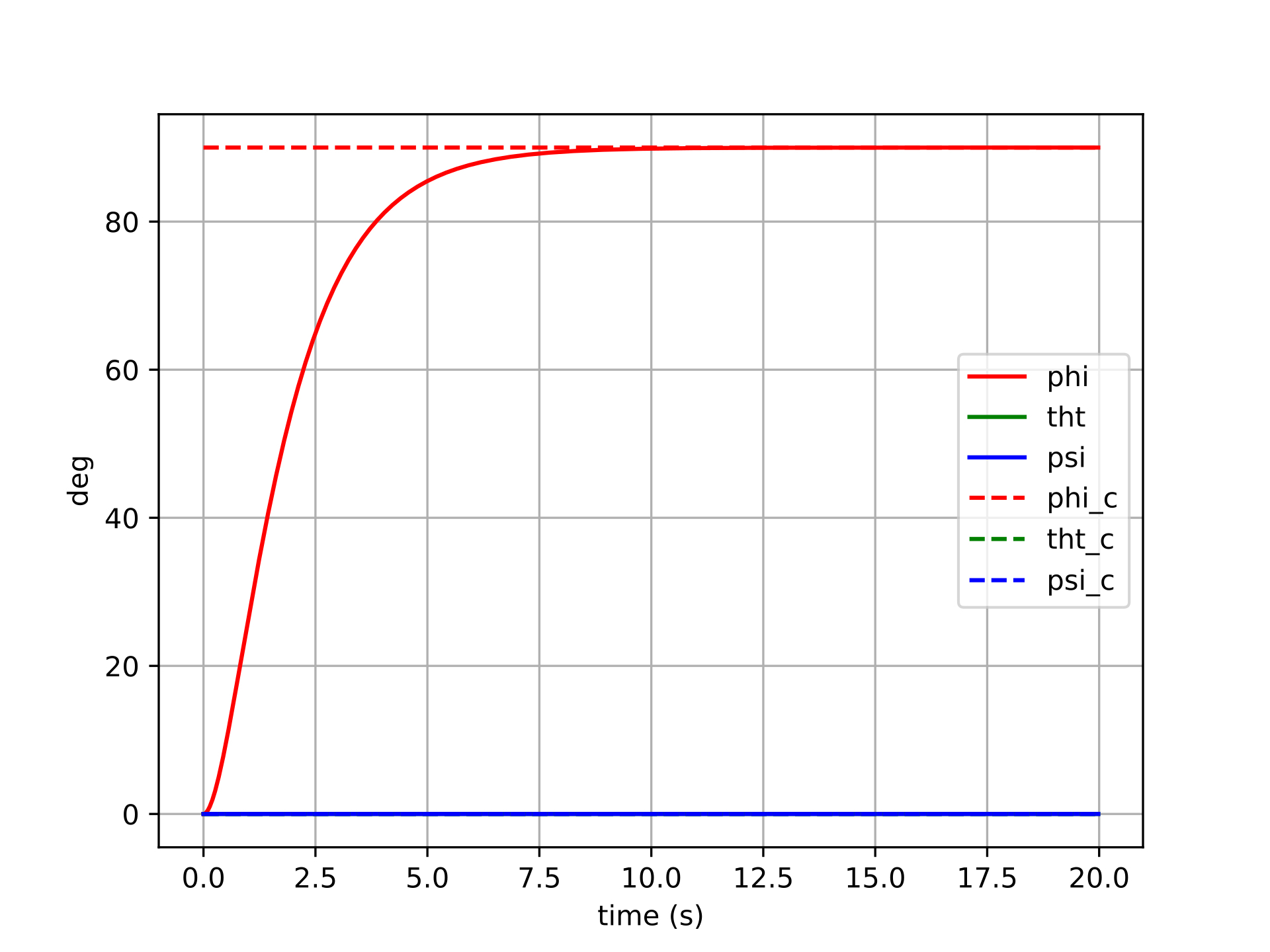
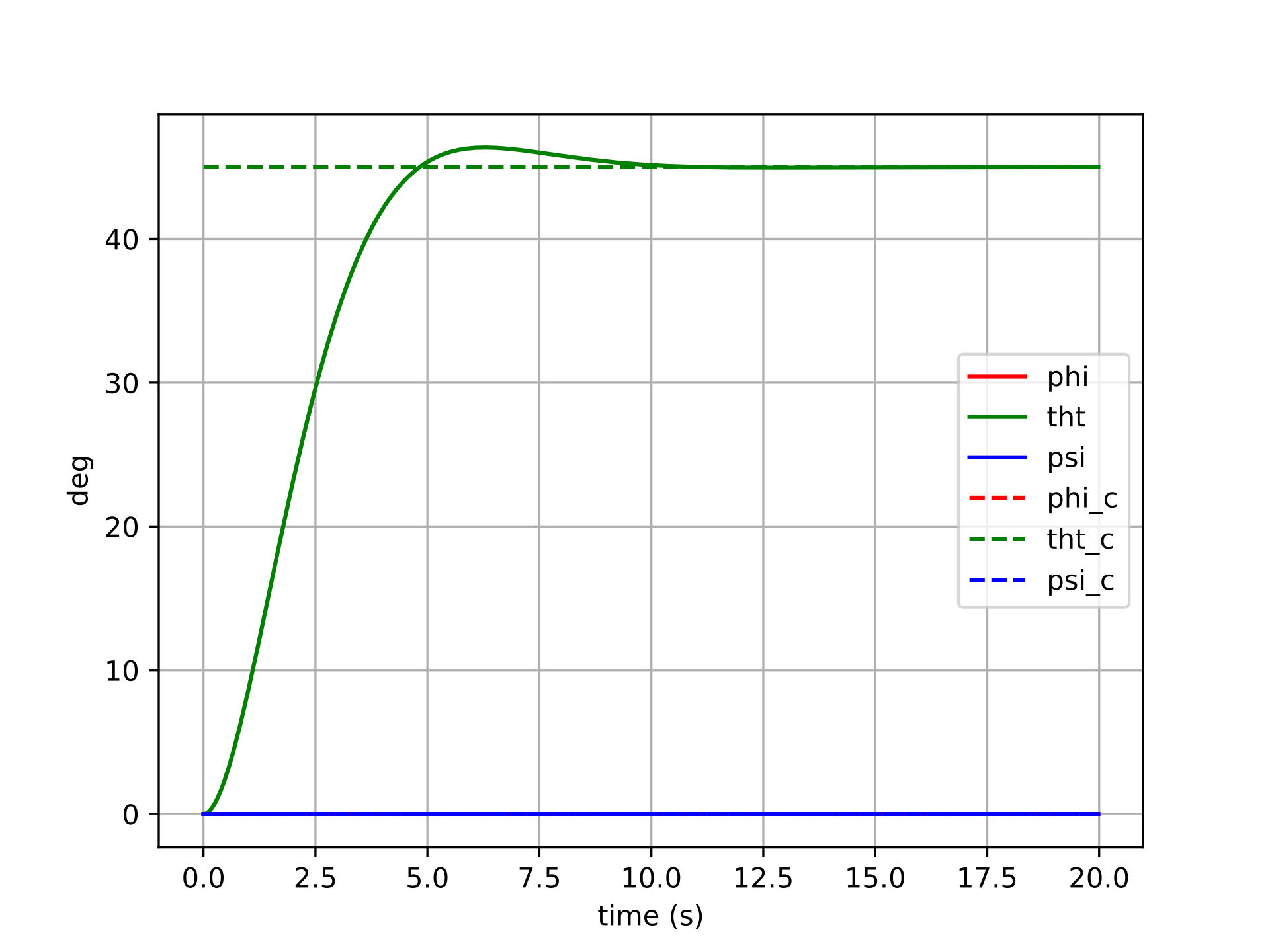
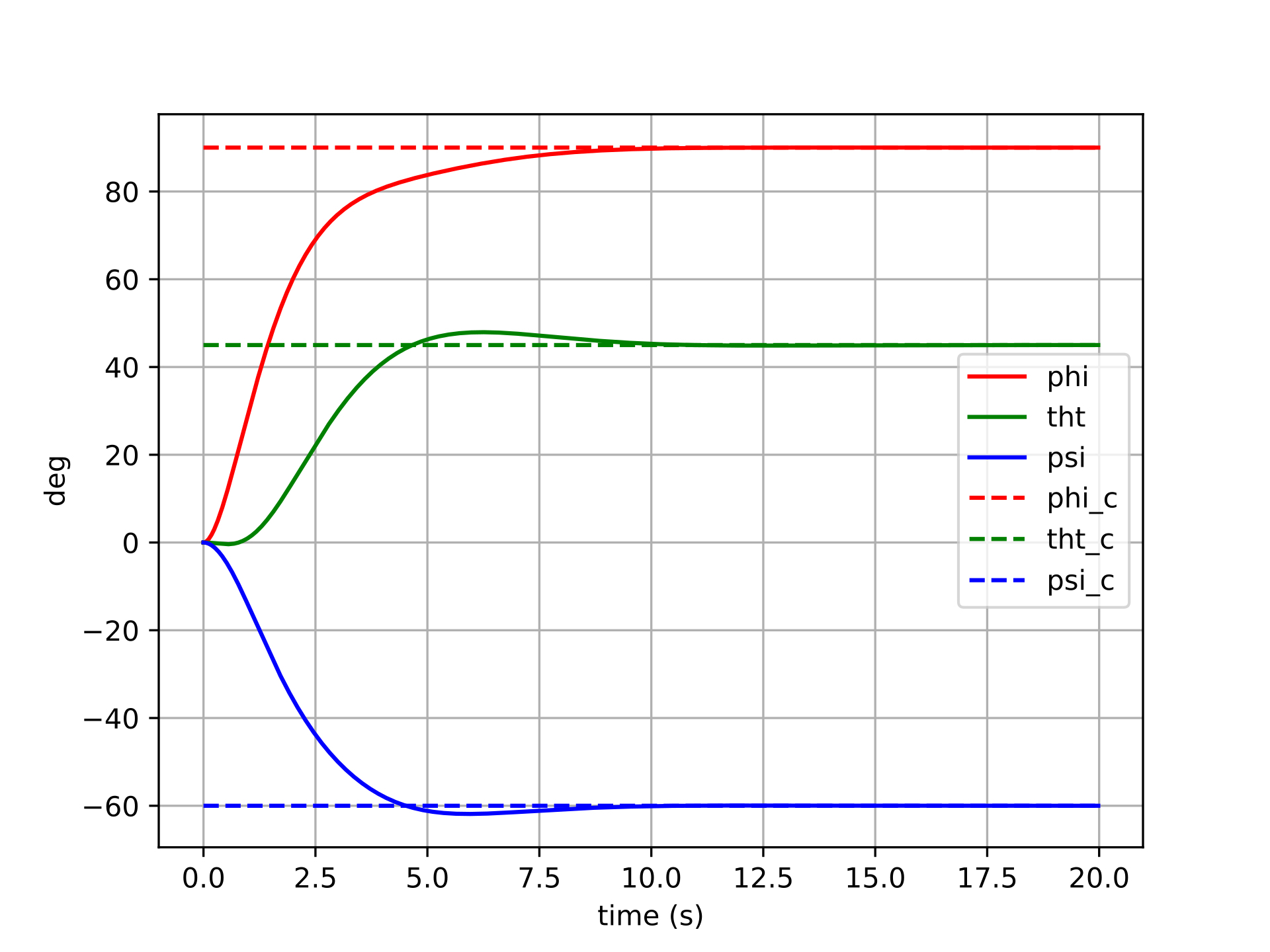
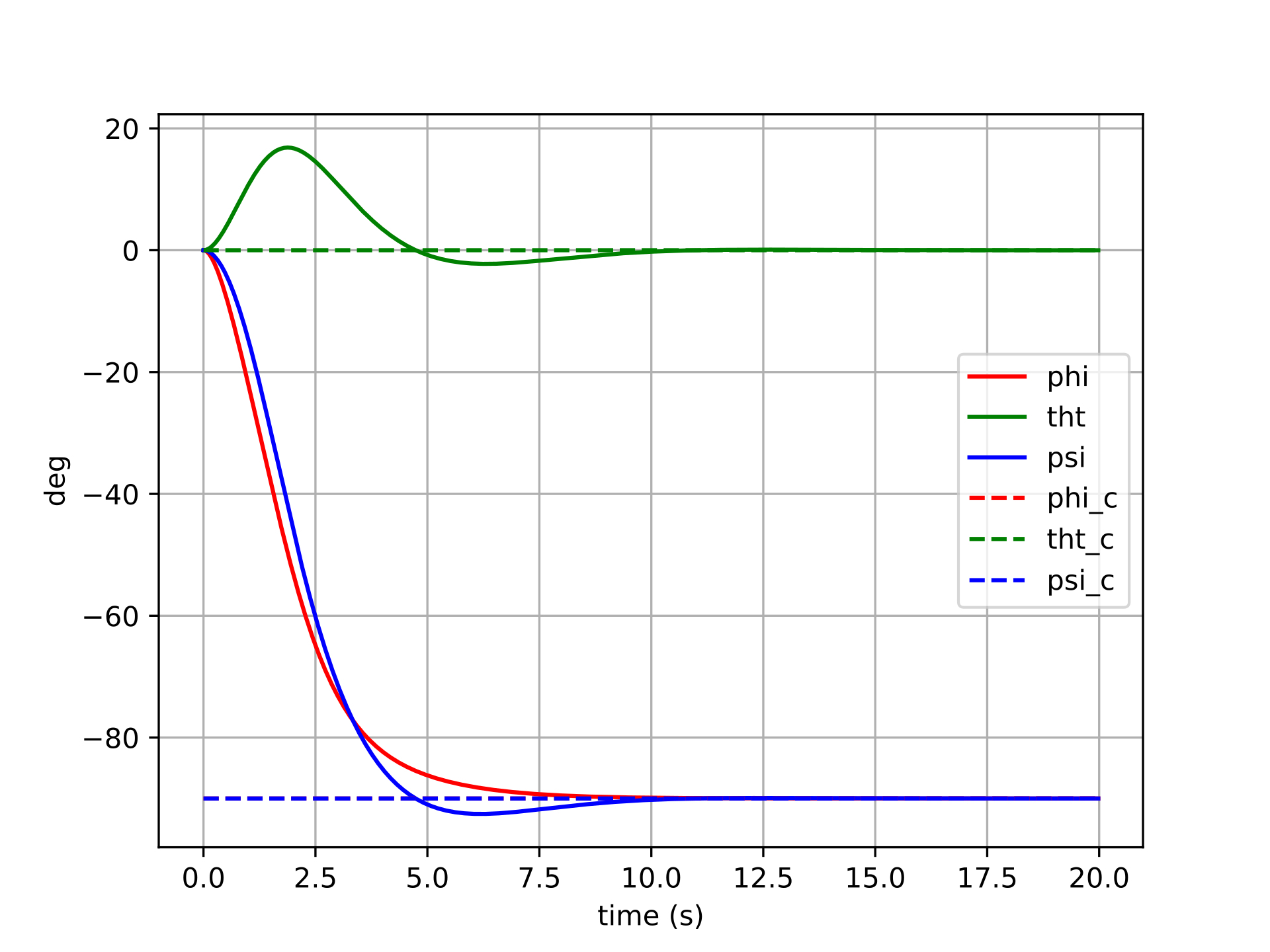
Results
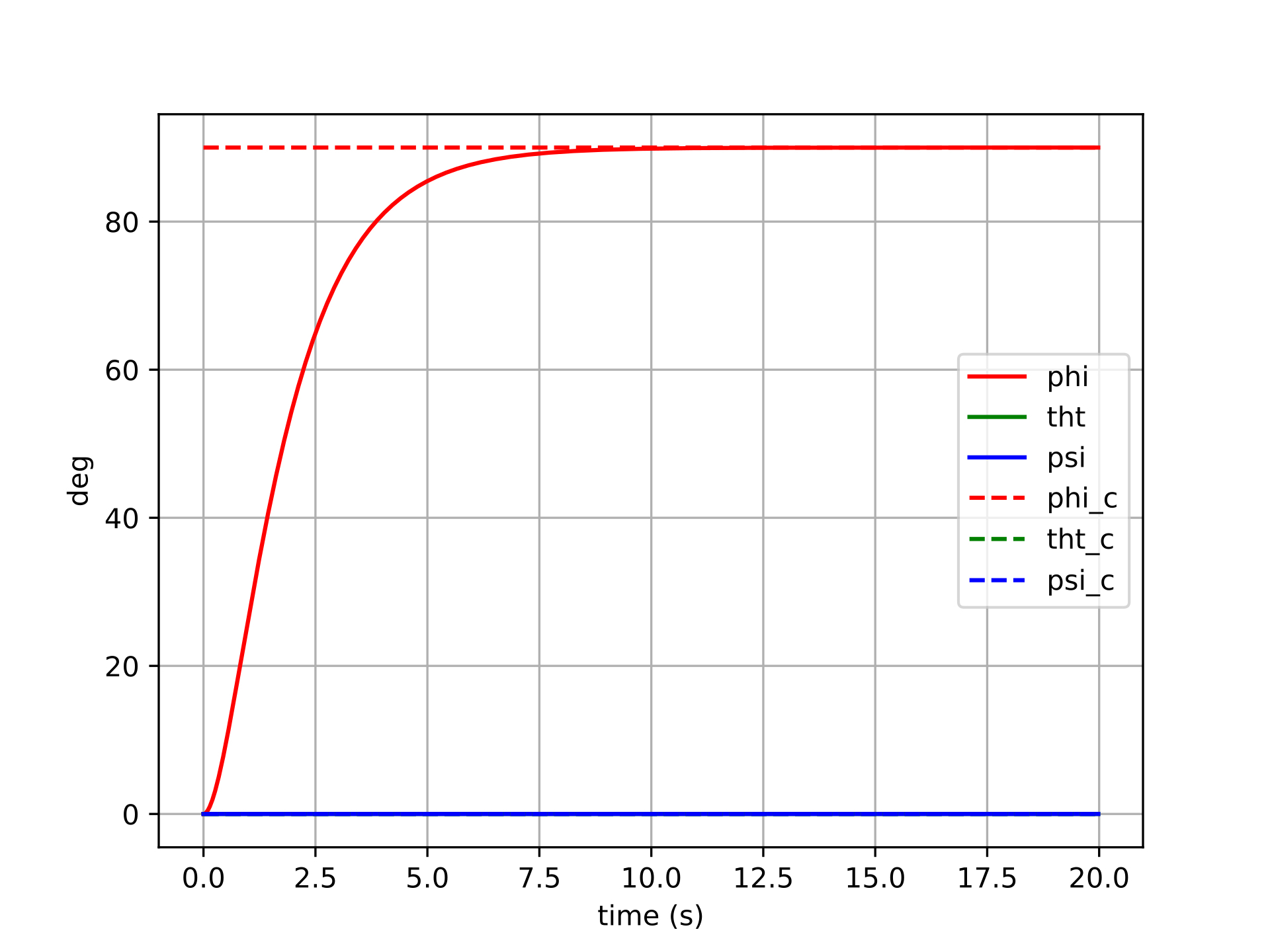
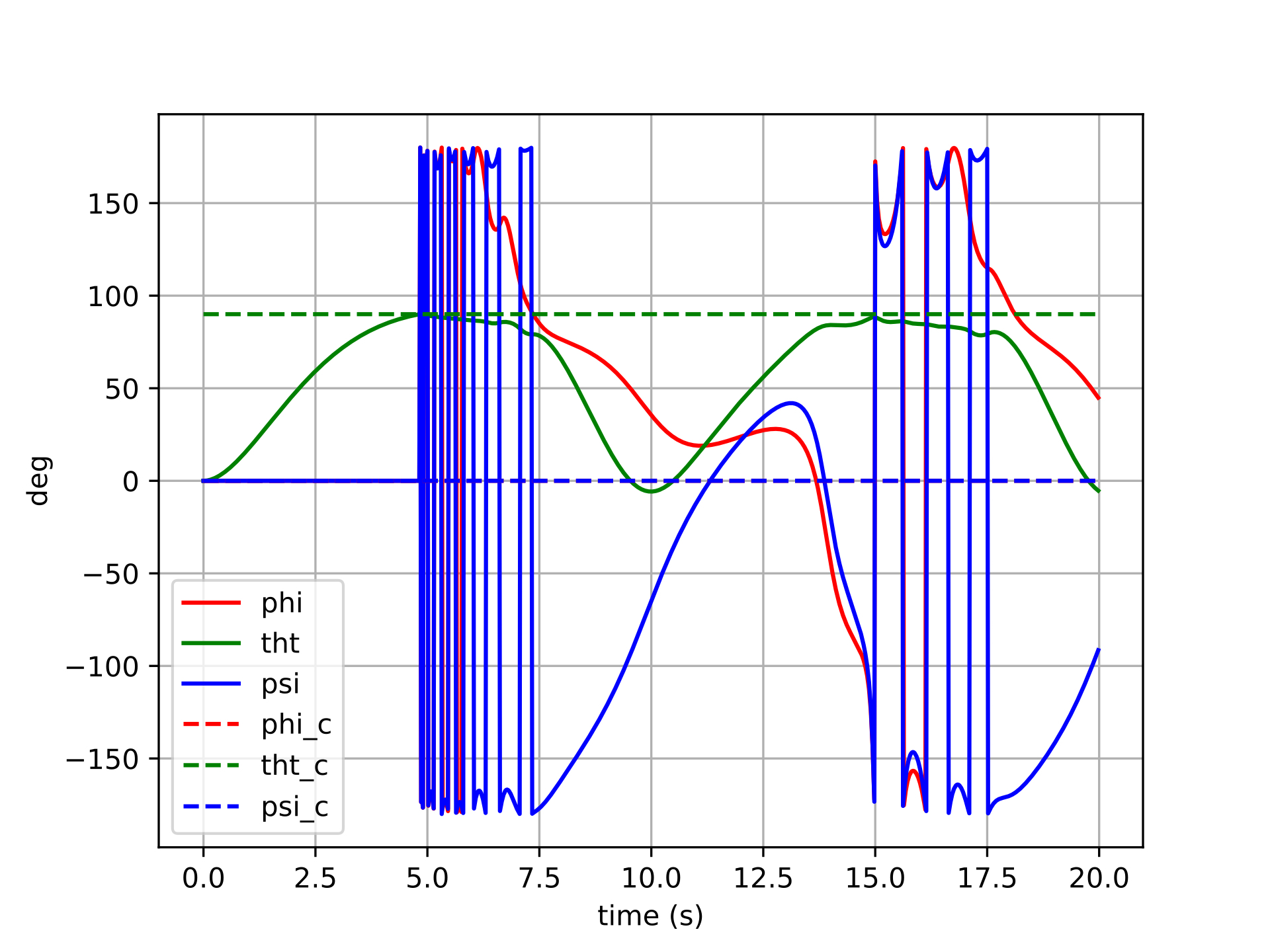
Controller with Euler Error
$$\boldsymbol{u}=-k_q\left(\begin{bmatrix}\phi-\phi_d && \theta-\theta_d && \psi-\psi_d\end{bmatrix}^{\top}\right)+\dots$$

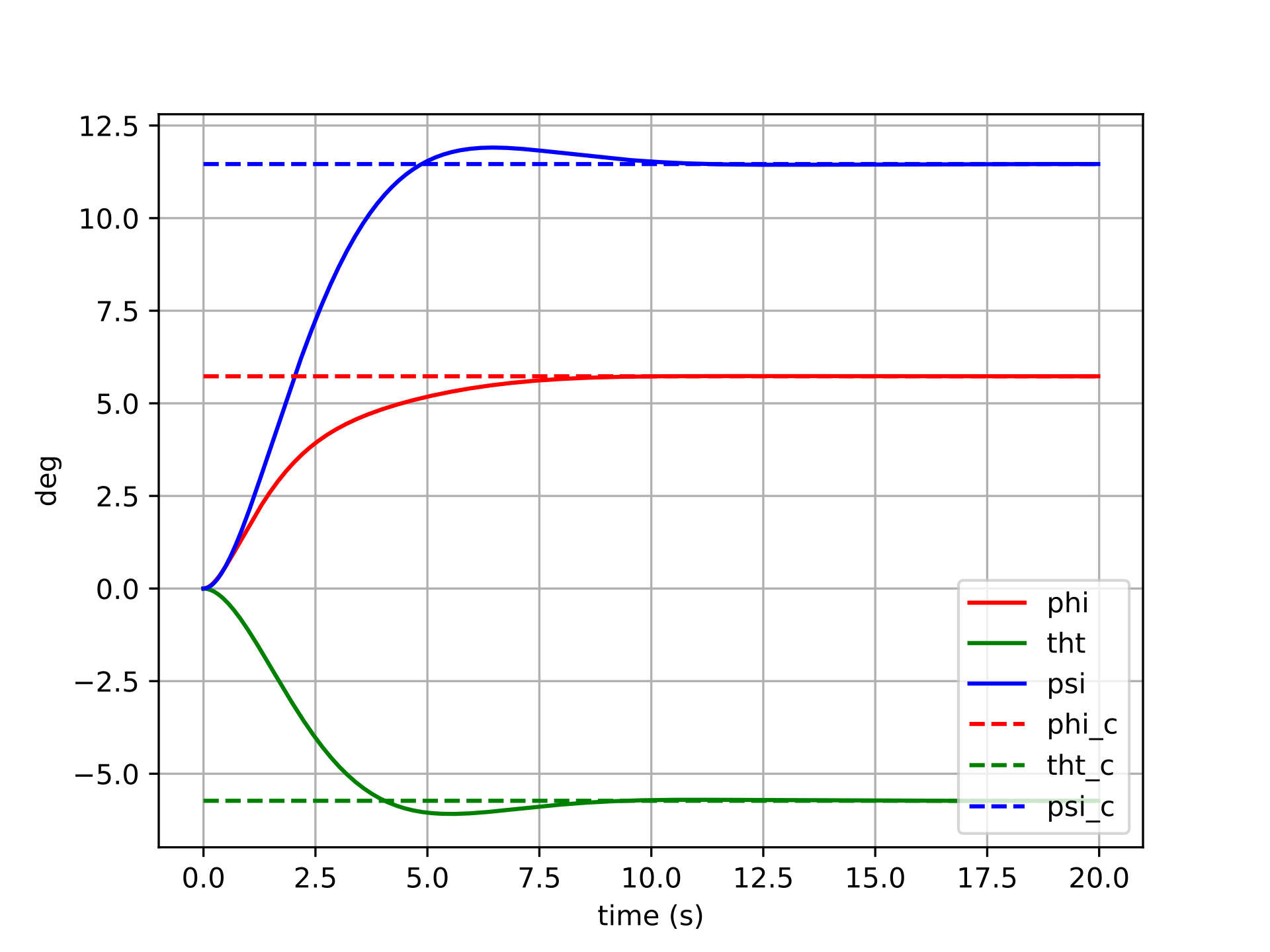
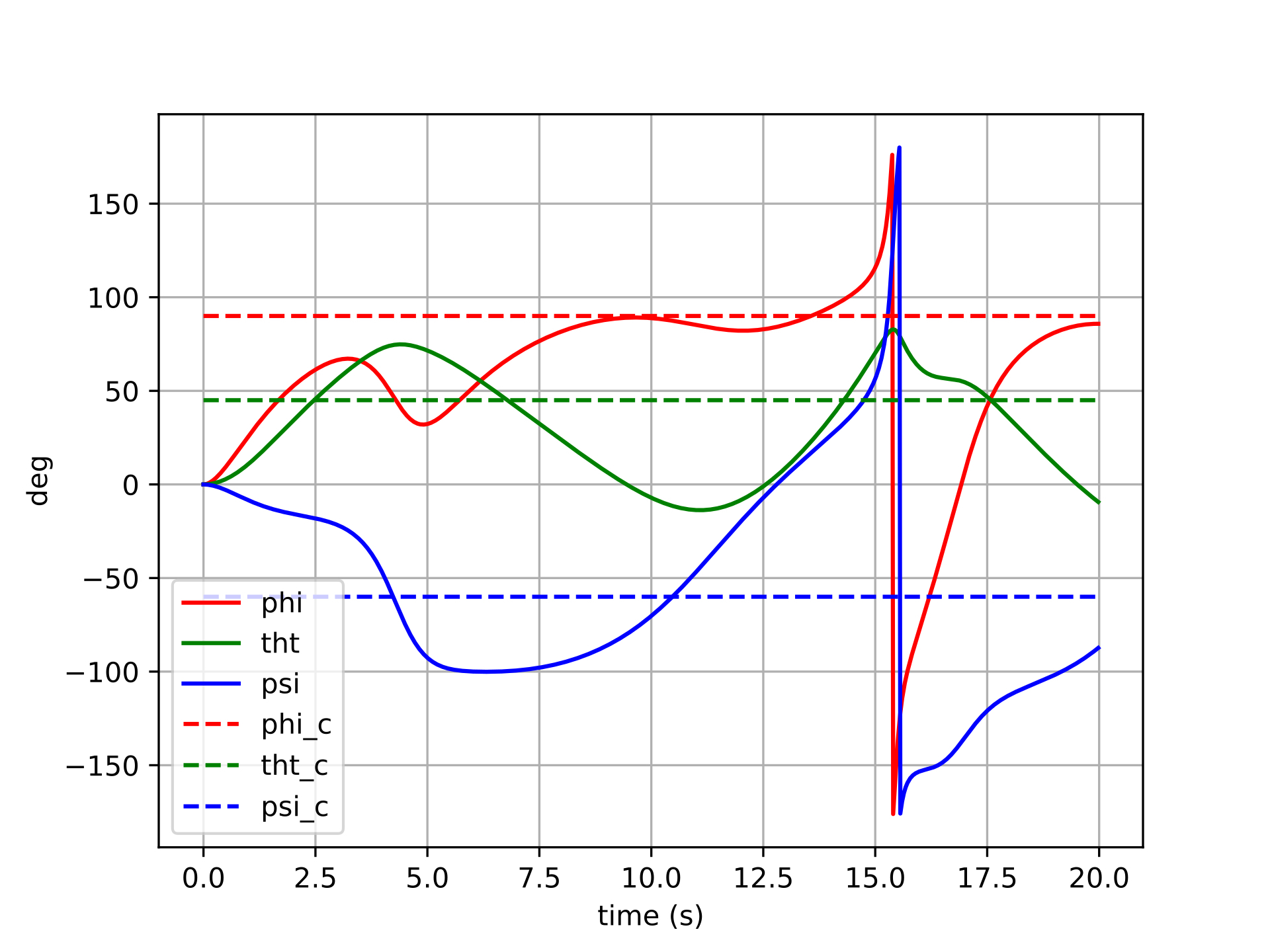

Controller with Tangent Space Error
$$\boldsymbol{u}=-k_q(\boldsymbol{q}\ominus\boldsymbol{q}_d)+\dots$$


Conclusions
